目前三大传感器:光学摄像头、毫米波雷达与激光雷达,已然成为自动驾驶领域中企业标配的传感器。一方面,除激光雷达外,光学摄像头与毫米波雷达其成本已下降到非常可观的地步,企业可大胆的“多”使用这两类传感器;另一方面,从产品性能表现看,三类传感器在不同的应用场景中能互补彼此的短板,如雨雾天中光学摄像头受影响,毫米波雷达依旧能探测范围内是否有障碍物,从而一定程度弥补摄像头“罢工”所带来的后果。

但是,这种“铁三角”组合,随着自动驾驶企业路测增多,在不同天气、不同路况、面对不同目标物等等问题后,显得不再牢固了。如在夜晚会车时因对方远光灯而使得自动驾驶车辆摄像头眩光,此时只剩下毫米波雷达与激光雷达可工作。而毫米波雷达自身又难以识别行人。而能识别行人的激光雷达,在考虑种种现实条件后,能有效覆盖的车前距离只有50m甚至更低,超出部分所探测得到的数据,不足以支持算法做出判断,从而做出正确的执行动作。而开过车的人都知道,50m的预判距离,对高速行车安全是远远不够的。
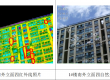
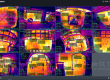
因此在夜间或者在恶劣天气条件下,使用红外热像仪应用到辅助驾驶方面的应用也越来越多,红外热像仪可使驾驶员发现500米开外的障碍物,从而能够更快辨别出行驶路径、行人、骑车人和障碍物。在疲惫的夜间旅行中,夜视辅助系统还能够缓解驾驶员的压力,使驾驶员保持足够精力来迅速和适当地应对危急情况。
红外热像仪系统的开发是基于红外热成像原理,是一款为了在夜间或者恶劣天气条件下增强司机视野而设计的高性能、高可靠性的热成像红外夜视系统。它将视场内的热像内容转换成二维图像。在黑夜或雾雨等恶劣的天气条件下,通过系统采用的核心图像处理技术,可以实时显示车程目标,供给司机观察识别,大幅提升驾驶安全系数,保障人身财产安全。