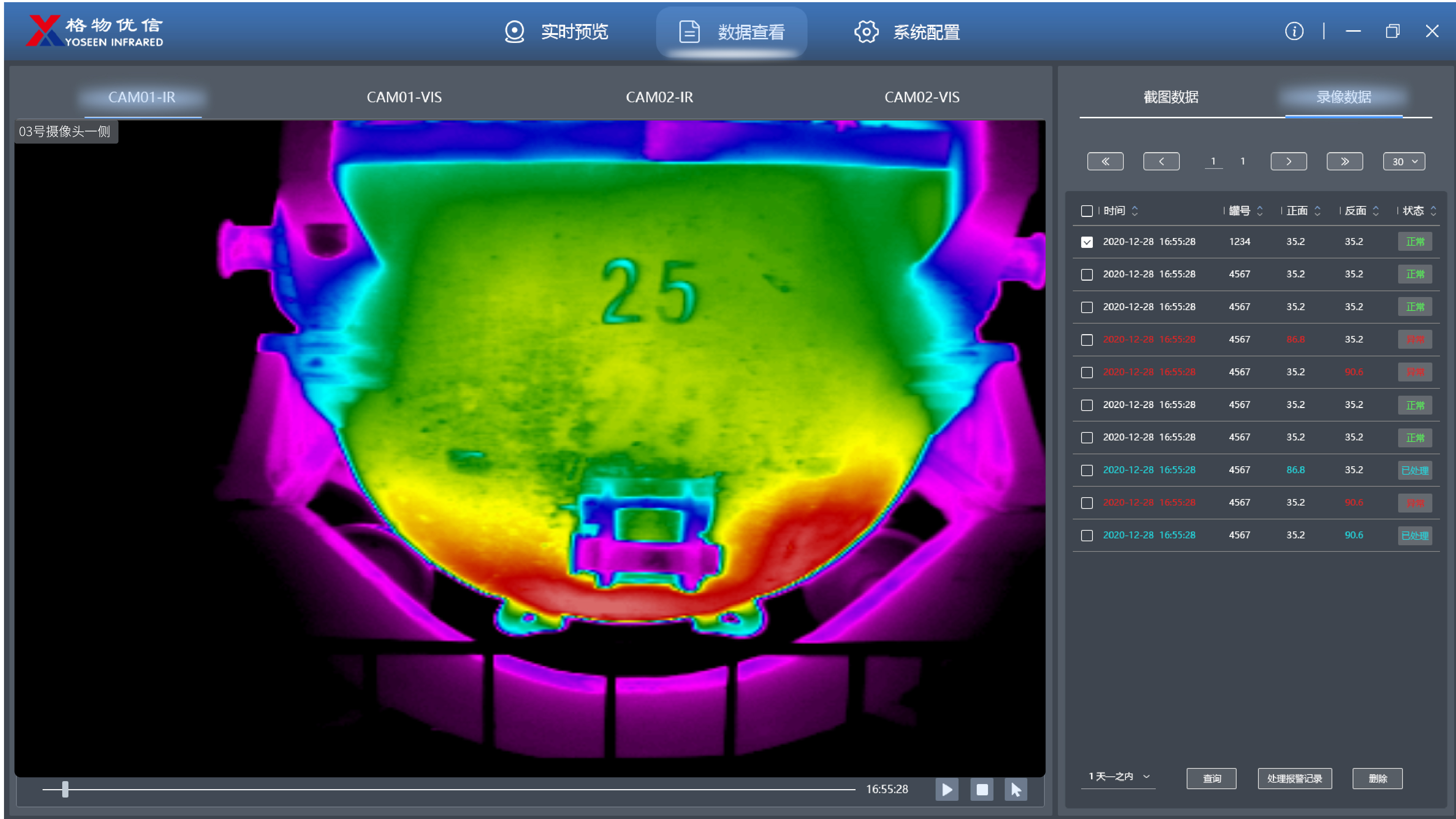
罐号识别系统
铁水罐号自动识别系统工作的基本原理是:图像采集装置连续不断地采集图像,前端摄像机对传来的图像进行实时处理并输出识别结果,识别结果最后通过网络送交给控制台进行管理。

系统硬件组成
一个典型的铁水罐号自动识别系统在硬件主要包括嵌入式工控机、图像采集卡以及黑光摄像机,其组成原理图如图1-1所示:
黑光摄像机一台
黑光摄像机是一种半导体图像传感器,与摄像管相比,体积小、重量轻、功耗低、噪声小、结构简单可靠、分辨率高、光谱适应宽、输出线性好等一系列优点。黑光摄像机安置在铁水罐必经路径采集图像。
图像采集卡一张
接收来自黑光摄像机输出的视频信号,并转化为计算机可以处理和识别的数字信号,实时的将视频信号反应在电脑屏幕上。采集卡一般都有对外的编程接口,通过外界命令,可以将连续视频中的某一帧以特定的文件类型保存下来。
工控机两台
一台装有图像采集卡,用于接收黑光摄像机图像信号,对其加工处理后输出识别结果,称之为前台机,前台机物理上接近铁水罐通过的场所。另一台接收来自前台计算机的识别结果,监控协调前台机的工作,我们称之为控制台。控制台物理位置远离前台机,环境更适合人工作。在控制台软件的支持下,一个控制台可以同时监控、协调多台前台机的工作,并进行相应的信息处理,如罐号数据库的管理等。
其它附属设备
包括电源、补充光源、风帘、网络线路等。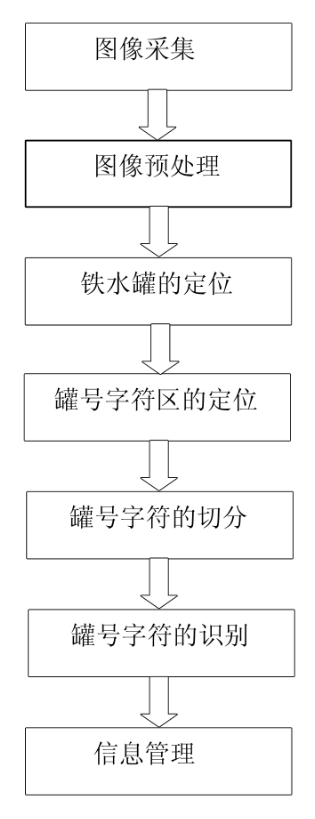
系统的软件设计方案
系统软件主要由:图像采集、图像预处理、铁水罐的定位、罐号字符区的定位、罐号字符的切分、罐号字符的识别以及信息管理等模块构成,其流程图如图1-2所示。
1图像采集
本系统采用黑光摄像机、视频采集卡实现图像的采集。这一步骤中完成对图像的单帧捕获及对视频采集卡的控制。
2图像预处理
由于实际环境中存在不利因素干扰以及图像在传输和转换过程中出现某些降质,这些情况通常会造成整个系统性能下降,因此,需要对图像进行预处理,尽可能的去除干扰以减少它们对系统性能的影响。
3铁水罐的定位
铁水罐的定位就是从采集的图像中找到铁水罐的位置并把它分割出来。它是罐号自动识别的基础。
4罐号字符区的定位
罐号字符区的定位就是从经过铁水罐定位后的图像把罐号字符区分割出来,这是最难的一步也是最关键的一步。
5罐号字符的切分
罐号字符区的切分就是把罐号字符区图像分成单个字符图像,以便进行后面单个字符的识别。
6罐号字符的识别
利用各种识别算法识别罐号字符。本系统所涉及到的字符包括10个阿拉伯数字和两个英文字母,相对来说比较容易但由于罐号字符通常会出现粘连、缺损和变形因此又增加了识别的难度。
7信息管理
识别模块的处理结果送交给信息管理模块进行管理,如登记、查询等。至此,一个铁水罐号自动识别的周期完成。图像采集装置继续不断地采集新图像,周期性地重复进行上述处理过程。
铁水罐定位、罐号字符区定位、罐号字符切分与罐号字符识别是铁水罐号自动识别系统中的关键单元,其性能决定着系统识别的正确率。